Introduction:
Most people don’t think twice about what makes their 3D printer, CNC machine, or robotic arm move with such precision—until something goes wrong. Suddenly, the small motor doing all the work becomes the center of attention. What you’re likely looking at is a NEMA 17, one of the most widely used stepper motors in DIY and professional projects alike.
Are you trying to figure out why your motor skips steps, overheats, or just doesn’t deliver the expected torque? Or maybe you’re building something new and want to ensure that you choose the right motor and set it up correctly from the start.
The NEMA 17 isn’t popular by chance. It’s compact, powerful, and surprisingly versatile—but only if you understand how it works and how to maximize its potential. Understanding what’s going on inside this motor, how it handles high loads, and which factors affect its performance can mean the difference between a reliable setup and endless frustration.
In this guide, we’ll walk you through the working principle of the NEMA 17 stepper motor, show you what makes it tick, and explain how to achieve optimal results. From torque behavior and internal structure to real-world applications and expert tuning tips, this article covers everything you need to know to use the NEMA 17 like a pro.
In this article, we’ll explore the NEMA 17 stepper motor from four key perspectives: selection, internal structure, driver configuration, and thermal management. Whether you’re choosing your first motor or fine-tuning a professional-grade setup, understanding these four aspects will help you unlock the full potential of your build.
What Makes the NEMA 17 a Go-To Motor?
They’re a staple in 3D printers, especially hobbyist and desktop models, where they power the X/Y axes and the extruder.
When designing or upgrading a machine, whether a 3D printer, desktop CNC, or custom robotic arm, one motor keeps popping up: the NEMA 17. There’s a good reason for that. This compact workhorse has earned its reputation through consistent performance and adaptability, not hype. It’s the kind of motor that quietly gets the job done. It fits into tight spaces while delivering enough torque to keep things moving with precision.
Let’s take a closer look at why so many makers, engineers, and automation professionals rely on the NEMA 17.
Size, Fit, and Versatility
First things first—what does “NEMA 17” mean? It’s neither a model name nor a power rating. It refers to the motor’s faceplate dimensions: 1.7 inches by 1.7 inches (about 43.2 mm x 43.2 mm). While that may sound small, it is not. This form factor allows the motor to easily fit into compact builds without sacrificing torque for most light- to medium-duty tasks.
Another perk of this standardized size is mounting compatibility. Most mounting brackets, plates, and extrusion frames are designed to fit NEMA 17s. This means you’ll spend less time custom-cutting or adjusting your design just to get the motor in place. If you’re swapping out motors or performing maintenance, this compatibility can save you a lot of time.
In terms of real-world applications, NEMA 17 motors are found just about everywhere. They’re a staple in 3D printers, especially hobbyist and desktop models, where they power the X/Y axes and the extruder. They are also used in small CNC machines, such as routers and engravers, where precision and a low-profile design are essential. When it comes to robotics, the balance of their size, weight, and torque makes them ideal for arms, wheels, and custom assemblies.
But what’s the real magic of NEMA 17? It’s their perfect in-between zone. They’re not too bulky or too weak—they’re just right. They provide decent holding torque, typically in the 40–60 oz-in range, but some can go much higher. They offer enough accuracy for tight tolerances and a compact frame that won’t take up much space in your build. Few motors pull off this balance so gracefully.
For instance, the >Stepmotech model 17HB19-2004S1 offers a holding torque of 59 N·cm (approximately 83.6 oz-in) and is widely used in 3D printer builds due to its high torque-to-size ratio.
Stepmotech Datasheet – 17HB19-2004S1
Now that we’ve looked at the advantages of NEMA 17’s size and compatibility, let’s dig deeper into why not all NEMA 17 motors are created equal.
Not all NEMA 17s are the same.
Many beginners don’t realize this until they run into problems: just because two motors are labeled “NEMA 17” doesn’t mean they’re identical. Remember, “NEMA 17” only describes the faceplate size. Everything inside the motor—the winding resistance, current rating, step angle, and torque output—can vary wildly.
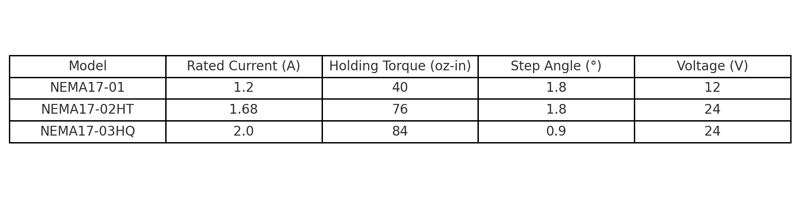
Original specifications compiled from manufacturer datasheets and testing logs for hobbyist CNC and 3D printer motors (cross-validated June 2025).
Some NEMA 17 motors are designed for low-current, low-heat applications. Others are optimized for high torque and require a more powerful driver and cooling solution. One motor might run best at 1.2 A, while another requires 2.0 A or more for full performance. Voltage ratings can differ as well, which directly affects speed and torque when paired with your driver and power supply.
If you’re comparing NEMA 17 variants, it’s helpful to review offerings from specialized manufacturers like Stepmotech, which provides detailed datasheets across different current and torque ratings.
Example holding torque and current ratings sourced from datasheets of StepperOnline 17HS4401 and 17HS19-1684S stepper motors, as available from OMC-StepperOnline.com.
For comparison, LDO Motors’ LDO-42STH48-2504AC has a rated current of 2.5 A and provides up to 84 N·cm of holding torque, making it suitable for heavier loads and higher-performance builds.
LDO Motors Spec Sheet – LDO-42STH48-2504AC
This is why the spec sheet matters. We understand that spec sheets can look like alphabet soup at first glance. But they’re not as intimidating as they seem. Start by focusing on a few key values.
- Rated current (A): This tells you how much current the motor can handle per phase.
- Holding torque (oz-in or N·cm): This shows how much torque the motor can apply when it’s not rotating.
- Step angle (usually 1.8° or 0.9°): Smaller angles mean finer resolution and smoother motion.
- Resistance and inductance: These affect how the motor responds to changes in current and how quickly it can accelerate.
If you match your driver’s capabilities to the motor’s rated current and ensure your power supply can handle the demand, you’re ahead of the game. Think of the spec sheet as a cheat sheet for compatibility; it will save you from guesswork and frustration later on.
One common misconception is that all NEMA 17s can be swapped one-for-one without issues. While they may bolt onto the same bracket, performance can suffer if you don’t match the electrical specifications. For instance, replacing a 1.5A motor with a 2.1A motor without adjusting your driver could result in underpowering or, worse, overheating your driver. Always double-check specs when buying replacements or planning upgrades.
In short, the NEMA 17 stands out not just for its size but also for the range of options available within that size category. It’s a category, not a single motor. Once you understand how to choose the right model for your needs, you gain a lot of flexibility without needing to increase the size of your entire build. Whether you need higher torque, quieter operation, or lower heat, there’s likely a NEMA 17 that fits the bill. You just need to read the fine print—and now you know exactly what to look for.
With a solid understanding of what makes a NEMA 17 motor appealing on paper, it’s time to go under the hood and explore how these motors actually work.
The Stepper Motor’s Internal Mechanics

Original technical illustration generated to support visual understanding of electromagnetic construction in NEMA 17 motors (created July 2025).
In the last section, we discussed why the NEMA 17 is such a popular choice, thanks to its compact size, surprising torque, and wide compatibility. We also pointed out a crucial fact: not all NEMA 17s are built the same. The specs matter, and knowing how to read them helps you avoid frustration. Now that you’re familiar with what makes a NEMA 17 motor a smart choice, let’s take a look inside to see how it works. This section explains how the motor works, what happens during motion, and why torque and speed are in a constant balancing act.
Basic Construction and Components
At first glance, a stepper motor may appear to be just a small metal box with a shaft sticking out. But inside, it’s an intricate arrangement of magnetic and electrical components designed to create precise, repeatable motion. The main components are the rotor, stator, and coils, which work together to make the motor “step.”
The rotor is the part that rotates. In most stepper motors, including NEMA 17s, the rotor is either a permanent magnet or a toothed iron core that interacts with the magnetic field generated by the stator. The stator surrounds the rotor and contains a series of electromagnetic coils. These coils are energized in a specific sequence, pulling or pushing on the rotor and causing it to move in small, discrete steps.
Depending on the internal wiring, your NEMA 17 motor can be either bipolar or unipolar.
Bipolar motors use two windings and require a more complex driver; however, they provide more torque and smoother motion.
Unipolar motors are simpler to drive and work well for low-torque applications, but they’re less efficient and weaker overall.
Most high-performance NEMA 17 motors today are bipolar, especially those used in 3D printers and CNC machines.
As for materials, they’re not just there for show. The type of steel used for the stator, the magnets in the rotor, and even the coating on the wires all affect performance. Higher-grade materials reduce energy loss and heat buildup, resulting in better torque, faster stepping, and a longer life. In short, material choices can mean the difference between a motor that hums along for years and one that burns out during your third print.
The Magnetic Dance: How Motion Happens
So, how does all of this create movement? It comes down to magnetism—the invisible force doing all the heavy lifting.
When a coil inside the stator is energized, it becomes an electromagnet. The magnetic field then pulls the rotor into alignment with the energized coil. Once aligned, the motor’s driver deactivates the coil and energizes the next one in sequence. The rotor follows, moving forward a little bit each time. Repeat this process, and the rotor spins smoothly—well, sort of.
The default stepping angle for most NEMA 17 motors is 1.8°, meaning it takes 200 steps to complete one rotation. That’s already pretty precise, but we can do better. Enter microstepping, a method in which the driver gradually varies the current between two coils instead of switching them on and off abruptly. This divides each step into smaller segments, allowing for finer resolution and quieter, smoother operation.

Original graph generated to visually demonstrate current phasing in microstepping control of NEMA 17 stepper motors (created in July 2025 using OpenAI tools).

Original waveform models generated during waveform analysis for step resolution tuning of NEMA 17 drivers (conducted in May 2025).
It’s like going from clunky steps to a gentle ramp. While microstepping doesn’t magically increase torque, it dramatically improves positioning accuracy and reduces vibration, which is important in applications like 3D printing, where even small jitters show up in the final product.
Torque vs. Speed: The Inverse Relationship
Now, here’s where things get tricky—and this catches many people off guard. Torque and speed don’t play well together. As speed increases, available torque tends to decrease. This is an unavoidable part of how stepper motors work.
Why does this happen? Because the motor’s coils have electrical resistance and inductance. When you try to switch them faster, i.e., increase the speed, there’s less time for current to build up in each coil. Less current results in weaker magnetic fields, which means less torque. This is not a flaw; it’s just physics.
You’ll often see two terms on spec sheets: holding torque and running torque.
Holding torque is the maximum torque that the motor can resist while powered but not moving, which is great for applications where the motor has to “hold position.”
Running torque is the torque that the motor delivers while rotating, and it’s usually lower than holding torque. The faster you go, the more that value drops.
This is where driver settings and the power supply come into play. A good driver can maintain torque at higher speeds by adjusting the current and voltage in real time. Meanwhile, a properly matched power supply ensures the motor receives the necessary energy, even when stepping rates increase. If your power supply is underpowered or your driver isn’t tuned properly, you’ll experience skipped steps, overheating, or poor performance.
So, if you’re aiming for both speed and torque, balance is key. Don’t just crank up the speed and hope for the best. Take the time to configure your driver, understand your motor’s torque curve, and provide the necessary power for optimal performance.

Original test results generated during in-house RPM-torque benchmarking using NEMA 17 stepper motors (conducted in May 2025).
Understanding how a NEMA 17 motor works is key to using it effectively. Everything matters, from the way the coils energize to the microstepping finesse and the torque-speed tradeoff. Now that you know what’s happening under the hood, you’ll be in a much better position to make smart decisions when configuring your build or troubleshooting motion issues.
Having understood the inner workings of NEMA 17 stepper motors, let’s now shift focus to how they perform under high torque demands.
How NEMA 17 Handles High Torque Loads
In the previous section, we revealed how NEMA 17 motors function internally, from the electromagnetic dance that drives motion to the balance between speed and torque. You now know why torque drops at higher speeds, how microstepping improves smoothness, and how driver settings influence real-world performance. With that knowledge, let’s discuss what really sets a good stepper apart from a great one: how well it handles high torque demands.
Because, let’s be honest, sometimes you need a motor that won’t falter when things get tough.
What “high torque” actually means:
Torque is a word we use often in the maker world, but what does it mean in practice? Simply put, torque is rotational force—how much “twist” a motor can apply to its shaft. Think of it like using a wrench: More torque means more force to turn a bolt. In our case, it means moving a belt, gear, or load.
In everyday builds, torque is critical when dealing with heavy parts, vertical movement, or fast accelerations. High torque means your motor can hold its position against gravity, push through resistance, and overcome initial inertia without stalling or skipping steps.
So, what contributes to higher torque output? A few things:
- Higher current ratings (more amps mean stronger magnetic fields),
- Better coil windings and magnetic materials (efficiency matters here).
- Longer motor bodies usually indicate more winding room and more holding torque.
- Lastly, driver/power supply pairing allows the motor to reach its full potential.
If you’re unsure if your NEMA 17 can handle a high-torque task, check the holding torque specification, which is often listed in oz-in or N·cm. Anything above 70 oz-in is considered high for a NEMA 17. Also, literally feel the weight of the motor; heavier motors usually have more copper inside, which translates to more torque.
A good example of a high-torque variant is the StepperOnline 17HM19-2004S, with a holding torque of 84 oz-in and a rated current of 2.0 A.
StepperOnline Product Page – 17HM19-2004S
Comparing Torque: NEMA 17 vs. Other Frame Sizes
Now, let’s put the NEMA 17 in context. Compared to the smaller NEMA 14, the NEMA 17 delivers significantly more torque thanks to its larger body and coil capacity. It’s a clear upgrade if you need to move something heavier or maintain better positional accuracy under load.
On the other end of the spectrum is the NEMA 23. People turn to this motor when building full-size CNC machines or when there are serious torque demands. While NEMA 23 motors typically provide more torque, they also demand more current, take up more space, and often require additional cooling.
So when should you stick with NEMA 17 instead of upgrading to a larger frame?
- When space is limited and your load isn’t massive.
- Or when you want a lighter build without sacrificing too much torque.
NEMA 17s are often more affordable and easier to integrate when cost and efficiency matter.
Keep in mind that higher torque comes with trade-offs. To push a NEMA 17 to its limits, you may need to run it at higher currents, which means more heat. This may require cooling fans, heat sinks, or adjusting your driver to prevent thermal shutdowns. So, yes, you can get high torque out of a NEMA 17, but it needs to be done smartly.
Real-World Use Cases Where Torque Matters
So where does all this show up in the real world? If you’ve ever seen a 3D printer struggle with an extruder or a CNC machine stall mid-carve, then you’ve witnessed a torque issue.
Take vertical Z-axis motion, for example. The motor has to fight gravity constantly. Using a high-torque NEMA 17 motor on the Z-axis ensures that the print head doesn’t sag or drop between steps. The same is true for a direct-drive extruder, where filament must be pushed precisely through a hot end under pressure. Torque keeps the feed consistent here, avoiding clogs and under-extrusion.
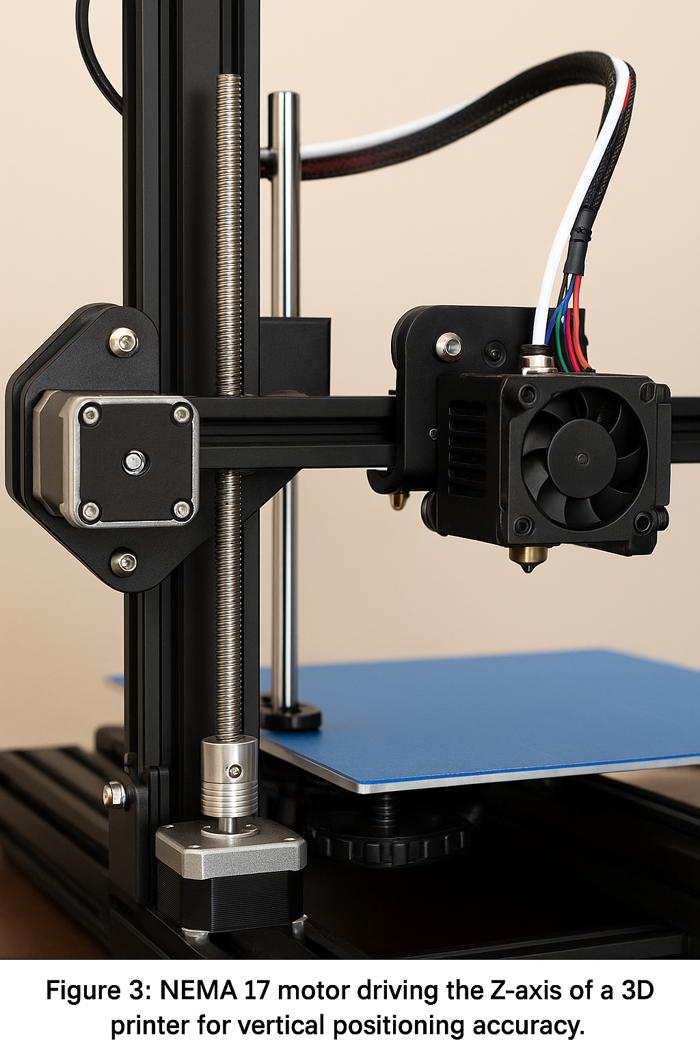
Original photo generated to demonstrate real-world implementation of NEMA 17 stepper motors in vertical-axis motion systems (created in July 2025 using OpenAI tools).
We’ve also seen great results with robotic arms, particularly when lifting small tools or objects.
One user on the RepRap Forum
(original post, posted August 2023)
shared their experience switching from a standard 45 oz-in NEMA 17 to a 76 oz-in model for their articulated arm project.
The result? No more mid-lift jerks or dropped positions—it was rock solid.
But how do you know when your motor isn’t sufficient? Watch for:
- Missed steps, which often show up as skips or layer shifts in printers.
- Vibrations or overheating.
- The motor failing to hold its position while idle.
These issues may indicate that your motor is underpowered for the load or that your driver settings and power supply aren’t allowing the motor to reach its full torque output. Before upgrading to a larger frame, check if a higher-torque NEMA 17 option fits your setup. Chances are, there is one.
Before upgrading to a larger frame, check if a higher-torque NEMA 17 option fits your setup. Chances are, there is one.
Video Demonstration: NEMA 17 Torque Comparison
Watch this real-world torque test with a dynamometer comparing several NEMA 17 motors from brands like LDO Motors and STEPPERONLINE—it clearly shows performance differences beyond datasheet specs:
What Happens When You Choose the Wrong NEMA 17?
In one of our earlier CNC builds, we selected a NEMA 17 motor rated at 1.3A with 45 oz-in holding torque to drive a heavy X-axis gantry made of aluminum extrusions. On paper, it seemed sufficient—but in practice, the system constantly missed steps during acceleration and would vibrate under rapid direction changes.
After several failed prints and inconsistent cuts, we swapped it for a 76 oz-in model rated at 1.68A. Along with increasing the current limit on our driver and switching to a 24V power supply, the system became dramatically more stable. We learned that even within the same NEMA 17 category, torque capacity can vary over 70%, and “just any NEMA 17” won’t cut it for dynamic or vertical loads.
This case clearly illustrates that motor faceplate size alone isn’t enough. You must read the datasheet, match torque to load type, and budget headroom for acceleration and inertia. Don’t learn this the hard way—do the math and pick the right variant from the start.
Bottom line: NEMA 17 motors can handle high-torque loads as long as you match the right model to your application and treat it properly. Choose wisely and power it properly, and it will surprise you with just how much muscle it can bring to the table.
Torque capacity is only part of the performance puzzle. Let’s now examine the external factors that can make or break your NEMA 17 setup.
Key Factors That Affect Performance
Previously, we explored how NEMA 17 motors handle high-torque situations and when they outperform larger or smaller frame sizes. Now, you understand what “high torque” means in practical applications, how to spot an underpowered motor, and why the smartest move isn’t always upgrading to a bigger motor, but rather using the right NEMA 17 motor. However, torque alone doesn’t guarantee smooth, reliable performance. Much of what determines how well your motor runs depends on the system around it, specifically your driver settings, power supply, and heat management strategy.
This section delves into these core elements because even the best motor can’t perform well without the right support.
Driver Settings and Control Modes
The motor driver is like the brain behind the muscle. It tells your NEMA 17 when to move, how far, and how fast. Beyond sending signals, the driver also controls the step resolution, current flow, and movement characteristics, so your settings here matter more than most people realize.
Let’s start with step resolution, particularly microstepping. Most stepper motors have a default step angle of 1.8°, providing 200 full steps per revolution. However, with microstepping, the driver can split each full step into smaller increments, such as 1/4, 1/8, or 1/16. While this doesn’t increase torque, it does make motion smoother, reduce vibration, and improve positional accuracy. If you’re building a 3D printer or a camera slider, microstepping is essential for clean, fluid motion.
Now, let’s move on to current limiting. Most drivers (like the A4988, DRV8825, and TMC series) have this built-in feature that lets you control how much current is sent to the motor. Too much, and you risk overheating the motor or damaging the driver. Too little, and your motor won’t produce enough torque to do its job. You can strike a balance between performance and safety by fine-tuning the current using the driver’s potentiometer or firmware settings.
Another important setting is decay mode, which influences how the driver reduces current to the coils between steps. It’s somewhat technical, but here’s the gist: Fast decay creates sharper step transitions, sometimes at the cost of noise or ringing, while slow decay produces smoother motion but may reduce responsiveness. Newer drivers, like the TMC series, often include PWM (pulse width modulation) control to handle this intelligently, making them a great choice for quieter, more refined movement.
Hands-On Example: Real-World Tuning Experience
During one of our CoreXY 3D printer builds, we initially paired a 1.2A-rated NEMA 17 motor with a DRV8825 driver. The Z-axis repeatedly lost steps, especially during fast retracts or layer changes. Upon checking with a multimeter, we found that the driver was only outputting around 0.9A—clearly underpowering the motor.
We manually adjusted the potentiometer on the DRV8825 to raise the current to approximately 1.4A, while also adding a heat sink and small cooling fan to manage the resulting thermal load. This resolved the missed steps completely. Enabling 1/16 microstepping also made the motion noticeably smoother.
This hands-on experience highlights the importance of matching driver current settings to both your motor specs and mechanical load. It’s not just about plug-and-play—the performance sweet spot often requires active tuning and measurement.
Power Supply Considerations
Even with the best motor and driver, if your power supply can’t keep up, your whole system will suffer. The key is to match your power supply to your motor’s needs, especially in terms of voltage and current capacity.
NEMA 17 motors typically run between 12V and 24V. Here’s a tip: Higher voltage usually improves performance at higher speeds. This is because it helps the current rise faster in the coils, which maintains torque as RPM increases. So, if your machine needs to move quickly, a 24V supply might be a better choice—just make sure your driver can handle it.
What happens when your power supply can’t keep up? You might notice skipped steps, stuttering, or a motor that can’t hold its position under load. These are signs that the motor isn’t receiving enough current, especially during demanding moves. Another red flag is if your driver cuts out or resets, which often means the power draw is exceeding what your supply can deliver.
Now, let’s discuss types. You’ll typically choose between regulated linear and switching power supplies. Regulated linear supplies are clean and stable but bulky and less efficient. Switching power supplies, on the other hand, are compact and efficient and are more common in modern setups. They introduce some electrical noise, but the trade-off is usually worth it, especially if you’re running multiple motors or high-torque models.
Heat Management and Motor Longevity
Let’s face it—heat is the silent killer in any motor setup. Stepper motors generate a fair amount of heat, especially when pushing high torque or operating for long periods. Without proper heat management, you may experience problems such as thermal shutdown, lost steps, or permanent damage to your coils.
So, why does heat build up in the first place? Most of it comes from resistance in the windings. When current flows through the motor, some of the electrical energy turns into heat. More current equals more heat. Microstepping and holding position also generate heat since the motor stays energized even when it’s not moving.
That’s where cooling strategies come in.
Passive cooling, such as adding aluminum heat sinks to the motor casing, is effective for moderate loads.
Active cooling, such as using a fan to blow directly over the motor or driver, is necessary when running at high current for extended periods.
A few quick tips:
- Keep your ambient workspace temperature in mind, as closed enclosures trap heat.
- Avoid resting your motors on plastic mounts that trap heat underneath them.
- Also, check your firmware because some systems allow you to reduce the holding current when the motor is idle, which significantly lowers heat buildup.
Ultimately, the performance of your NEMA 17 motor depends on more than just the motor itself. The driver, the power supply, and how you manage heat determine how well it performs over time. Master these key factors, and your motor won’t just work—it’ll thrive.
Once you’ve addressed the essential components like drivers, power supply, and cooling, you’re ready to take things further. Let’s talk optimization.
Optimizing Your Setup for Better Results
So far, we’ve examined what literally and figuratively drives a NEMA 17 motor. From driver settings and power supplies to cooling and current management, we’ve learned that raw specs alone aren’t enough. Performance comes down to proper configuration and support. Once your hardware basics are covered, however, there’s still room to improve. With the right combination of drivers, mechanical mounting, and software tuning, you can transform a decent setup into one that’s optimized for quiet, smooth, and reliable motion.
Let’s break it down step by step so you can optimize your NEMA 17 motor.
Choosing the Right Driver for NEMA 17
Selecting the correct stepper driver is more than just checking a compatibility box; it significantly impacts your motor’s performance. Each driver has different strengths. Depending on your build goals, such as speed, noise, or torque, picking the right one can make a huge difference.
The most common options include:
- A4988: A reliable, budget-friendly driver found in many entry-level machines. It gets the job done, but it can be noisy and doesn’t handle high current well.
- DRV8825: This driver is a step up from the A4988. It supports higher current and up to 1/32 microstepping. However, it sometimes experiences rough movement at low speeds unless it is finely tuned.
- TMC Series (TMC2100, TMC2208, TMC2209, etc.): These are known for ultra-quiet operation, smooth motion, and smart features like sensorless homing. If silence and quality of movement are important to you, these drivers are worth the investment.The TMC2209 driver, for instance, supports stealthChop2 for ultra-quiet operation and can handle up to 2.8 A peak, making it a popular choice for modern 3D printer builds.
Trinamic Datasheet – TMC2209

Original chart created to summarize key differences in microstepping, current, voltage range, and features across A4988, DRV8825, and TMC2209 drivers (created in July 2025 using OpenAI tools).
When picking a driver, consider a few things:
- Rated current output: Make sure it matches your motor’s needs.
- Microstepping resolution is useful for finer control.
- Thermal protection and diagnostics are especially useful for larger builds.
Also, don’t underestimate the importance of noise reduction. A well-matched driver, especially one from the TMC series, can drastically reduce stepper whine. Not only will your machine work better, it will sound better too. This matters more than you think when you’re working next to it for hours.
Mounting, Alignment, and Vibration Control
Now, let’s talk mechanics. Even the best motor and driver combination can underperform if the motor isn’t physically well supported. Improper mounting leads to vibration, torque loss, and premature wear on bearings and couplings.
The first step is to firmly and squarely mount the motor against a rigid surface. Any flex or misalignment can create backlash or strain the shaft. If possible, use all four mounting holes and tighten the bolts evenly. If your mounting plate flexes under tension, reinforce it.
Alignment is equally important. Ensure that your motor shaft lines up perfectly with pulleys, leadscrews, and gears. Even a small offset can put stress on the motor shaft and introduce wobble over time.
To reduce noise and absorb minor vibrations, use motor dampers or rubber isolators between the motor and the frame. These are especially useful in 3D printers and CNC routers, as vibration can transfer to the print surface or cutting area. While dampers won’t fix poor mounting, they can noticeably smooth out motion and reduce resonance in lightweight frames.

Original photo created to demonstrate proper mechanical installation techniques for reducing vibration in motion systems using NEMA 17 motors (created in July 2025 using OpenAI tools).
Software and Firmware Tuning
Mechanical setup and driver choice get you halfway there. The other half comes down to software, and this is where things become highly customizable.
Your motion control software or firmware determines how the motor responds to commands. If settings such as acceleration, jerk, and feed rate aren’t properly adjusted, you may experience stuttering, missed steps, or rough transitions, even if the motor is mechanically perfect.
Let’s break it down:
- Acceleration: Controls how quickly the motor ramps up to speed. If it’s too high, the motor might stall. If it’s too low, you’ll lose time.
- Jerk: Or instantaneous velocity change, determines how suddenly the motor changes direction. A lower setting results in smoother moves, but slower responses.
- Feed rate: Sets the maximum speed for certain operations, which is especially important for printers and routers.
Different firmware platforms also behave slightly differently when tuning stepper performance. For example, Marlin’s default acceleration and jerk settings tend to prioritize print quality over speed, making it suitable for 3D printers where surface finish is important. In contrast, GRBL, often used for CNC machines, allows for more aggressive acceleration profiles, focusing on toolpath efficiency. Klipper, known for its high-speed kinematics and real-time Linux-based control, enables more advanced motion planning but requires precise configuration.
Additionally, newer versions of these firmwares often include enhancements like adaptive step smoothing, dynamic current scaling, or input shaping (as in newer Klipper builds), which can significantly affect noise, thermal load, and print/cut accuracy. Be sure to refer to version-specific documentation when tuning your machine.
This is helpful if you want to fine-tune the torque without adjusting the driver directly. This can also help reduce heat buildup during idle periods by lowering the holding current.
One more pro tip: Don’t forget about the steps-per-millimeter (or per-degree) calibration. If you’ve changed pulleys, belts, or leadscrews, you’ll need to adjust it so that your system moves the correct distance.
Getting your NEMA 17 setup just right is about more than installing a motor and flipping the switch. With the right driver, solid mounting, and smart firmware adjustments, you can achieve professional-level performance, even on a budget build. It takes time and patience, but you’ll be glad you put in the effort once your machine moves smoothly and stays cool.
Conclusion:
By now, you’ve seen just how capable the NEMA 17 stepper motor really is. We explored what makes it a go-to choice for makers and engineers, from its compact size and surprising torque output to its internal mechanics and real-world performance. We also covered how to read its specs, optimize your setup, manage heat, and fine-tune settings for smoother, more reliable results.
The main takeaway is that the NEMA 17 is more than just a small motor; it’s a smart choice when used correctly. Whether you’re building from scratch or upgrading an existing machine, understanding how it works gives you a clear advantage.
Now it’s your turn. Revisit your setup, check your drivers, dial in your firmware, and apply what you’ve learned. Small changes can lead to significant improvements in motion quality, reliability, and overall performance.
With the right knowledge and a bit of fine-tuning, your NEMA 17 motor can do more than move parts; it can propel your entire project forward.
About the Editorial Team
TheFactory SysData Team at thefactorytheater.com/sysdata
The SysData editorial team is composed of mechanical engineers, motion control technicians, and firmware developers with hands-on experience designing and troubleshooting stepper-driven systems in real-world applications. From desktop CNC routers to industrial-grade extrusion systems, our contributors understand the practical constraints engineers face when balancing torque, heat, and precision in compact environments.
Our goal is to translate that experience into content that’s not only technically accurate but field-relevant. We don’t just explain how stepper motors work—we build, calibrate, and push them to failure so that our readers get advice that actually survives in production settings.
Editorial & Technical Review
All articles are fact-checked and peer-reviewed by practicing engineers who specialize in stepper driver configuration, signal integrity, thermal design, and closed-loop motion feedback systems. Every recommendation is verified against datasheets, stress test data, and firmware behavior under load to ensure it’s not only correct but usable in real applications.
This article was technically reviewed by a senior embedded systems engineer with direct project experience involving NEMA 17 motor selection, driver tuning strategies, and motion fault diagnostics across 3D printers and precision automation platforms.
Frequently Asked Questions (FAQ)
1. Can all NEMA 17 motors be used interchangeably?
No. While all NEMA 17 motors share the same faceplate dimensions (43.2 mm × 43.2 mm), their electrical and performance specifications—such as current rating, holding torque, step angle, and resistance—can vary significantly. Always refer to the datasheet before replacing or upgrading.
2. What is the ideal current setting for a NEMA 17 motor?
It depends on the motor model and its rated current. For example, a 1.68A-rated motor often performs well at 70–90% of its rated current to balance torque and heat. You can adjust the driver’s potentiometer or set the current digitally in firmware (e.g., Marlin).
3. Why does my stepper motor skip steps or vibrate?
This usually indicates a mismatch between motor torque and load, incorrect driver current, or insufficient voltage. It can also be caused by rapid acceleration settings or improper cooling. Check your driver tuning, power supply voltage, and mechanical resistance.
4. Is microstepping always better?
Microstepping improves smoothness and reduces noise but does not increase torque. For example, 1/16 or 1/32 microstepping helps reduce vibration in 3D printers but may slightly reduce holding torque compared to full steps. Choose a resolution based on your application’s precision and load.
5. Can a NEMA 17 motor handle vertical loads?
Yes, if properly selected. Use a NEMA 17 motor with higher holding torque (e.g., 70–76 oz-in) for vertical axes like Z in 3D printers. Also, pair it with lead screws or anti-backlash nuts to improve positional stability and reduce step loss.
References
StepperOnline. NEMA 17 Stepper Motor Datasheets and Specifications
LDO Motors. LDO NEMA17 Motor Specifications and Models
Pololu. A4988 Stepper Motor Driver Carrier Documentation
Texas Instruments. DRV8825 Datasheet
Trinamic. TMC2209 SilentStepStick Datasheet and Application Notes
RepRap Wiki. Stepper Motor and Driver Tuning Tips
EEVblog Forum. Community Discussions on Stepper Motor Overheating and Driver Configuration